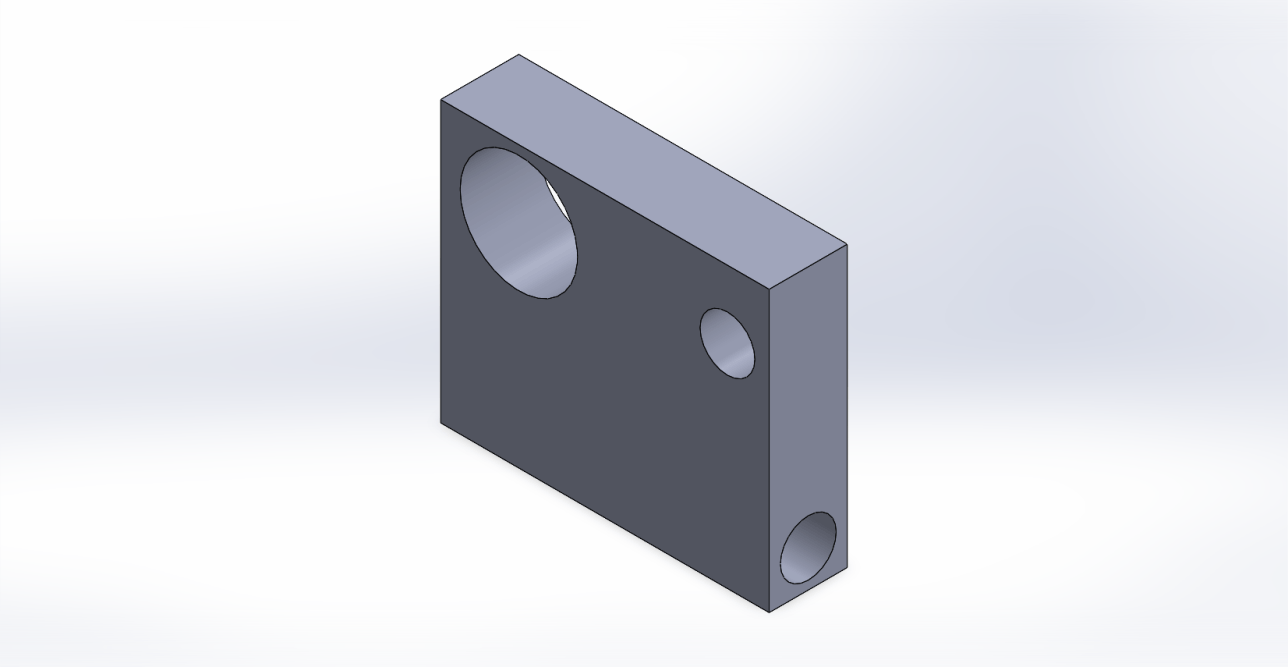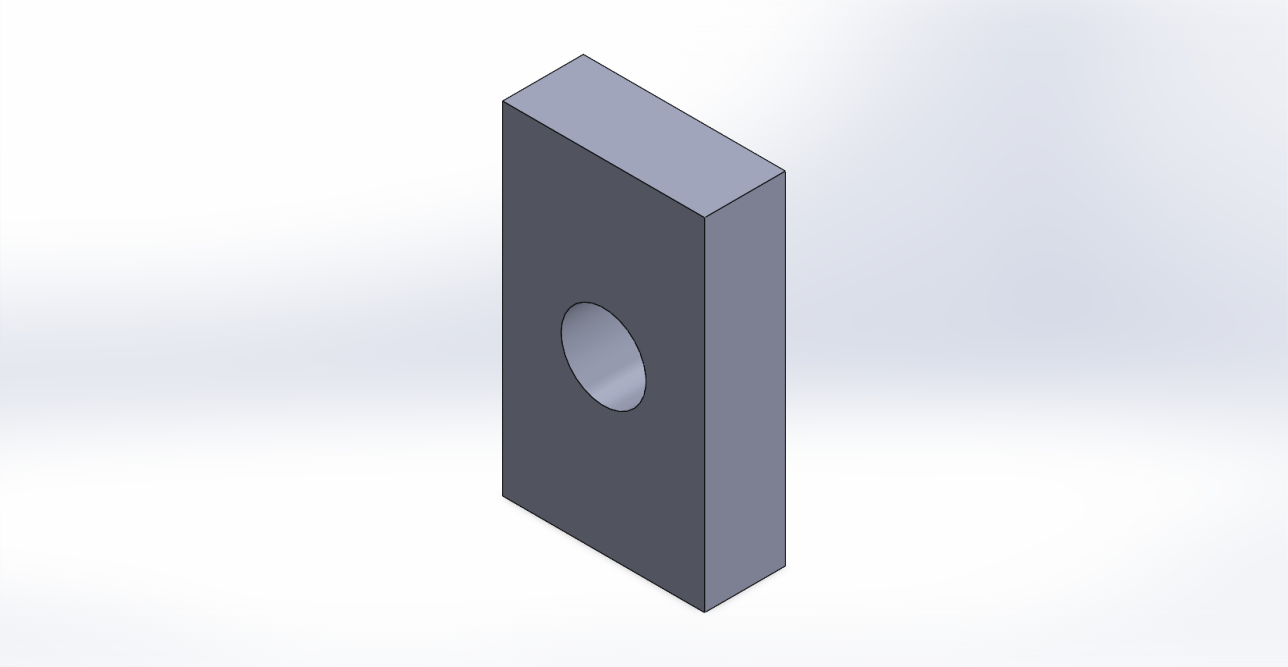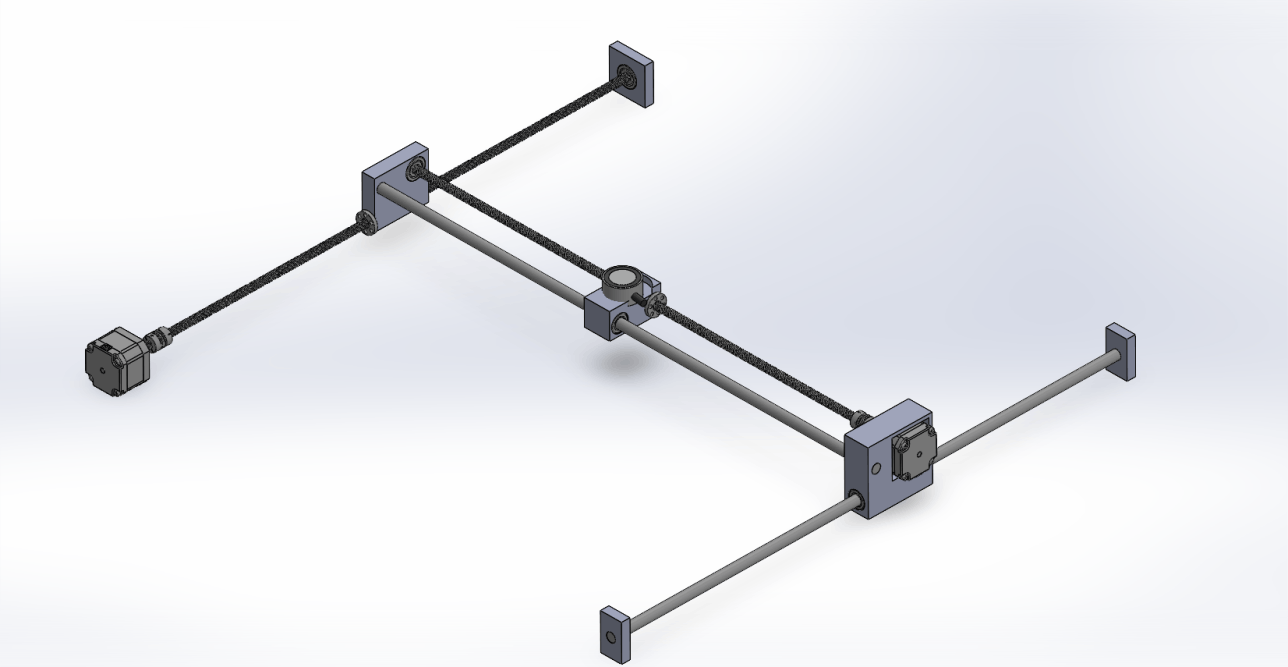
Mechanical
Website Design
Mobirise is an easy website builder. Just drop site elements to your page, add content and style it to look the way you like.

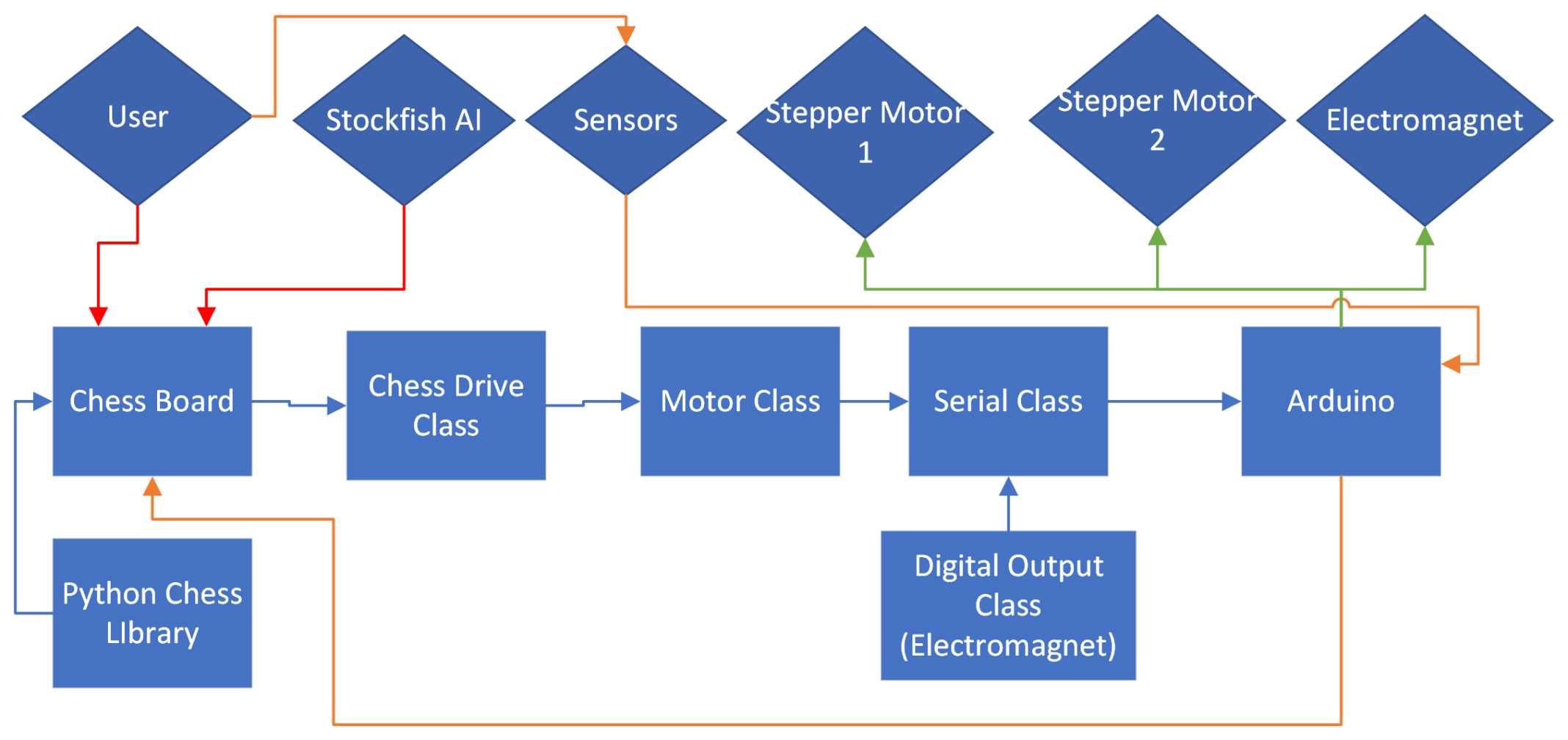
Software
HTML/CSS Coding
You don't have to code to create your own site. Select one of available themes in the Mobirise Site Maker.
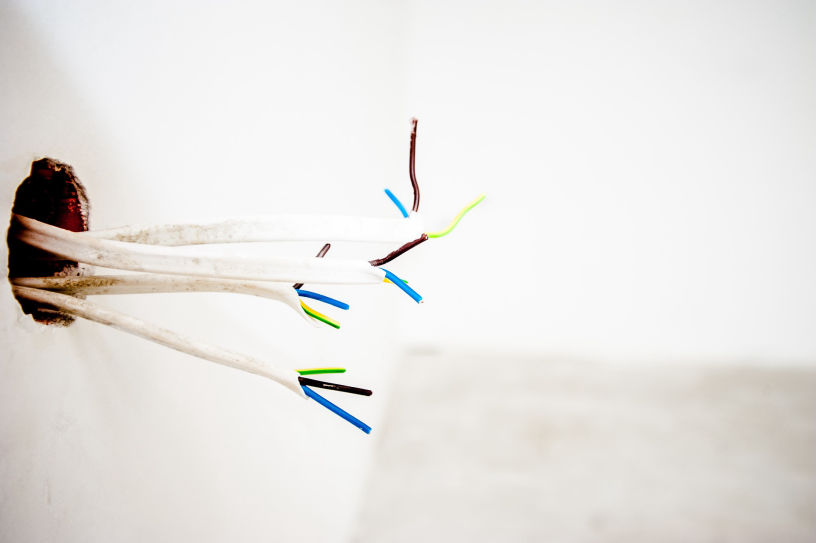
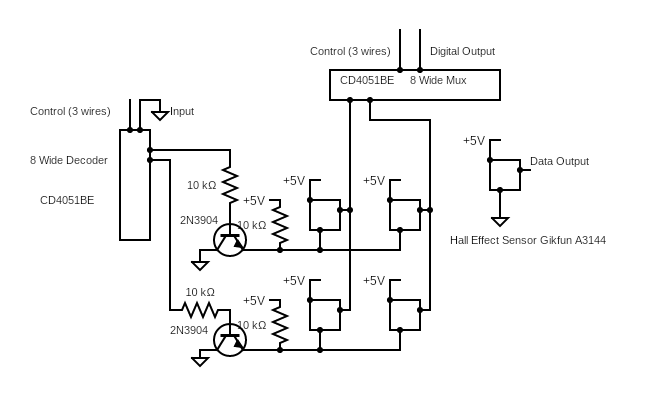
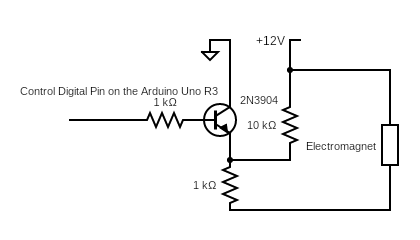
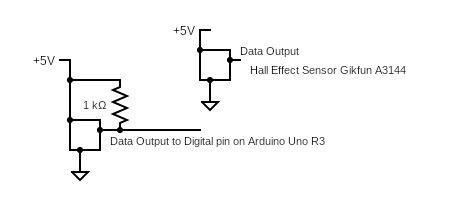
Electrical
Creating Your Brand
Select the theme that suits you. Each theme
in the Mobirise Website Software contains a set of unique blocks.