The Challenge
Programming a Neato robot vacuum to perform multiple autonomous behaviors presented unique opportunities to explore robotics control systems. The project involved creating intuitive teleoperation controls with reliable stop mechanisms, developing precise motion control for predictable movements and turns, and implementing sensor processing algorithms to detect walls and objects effectively.
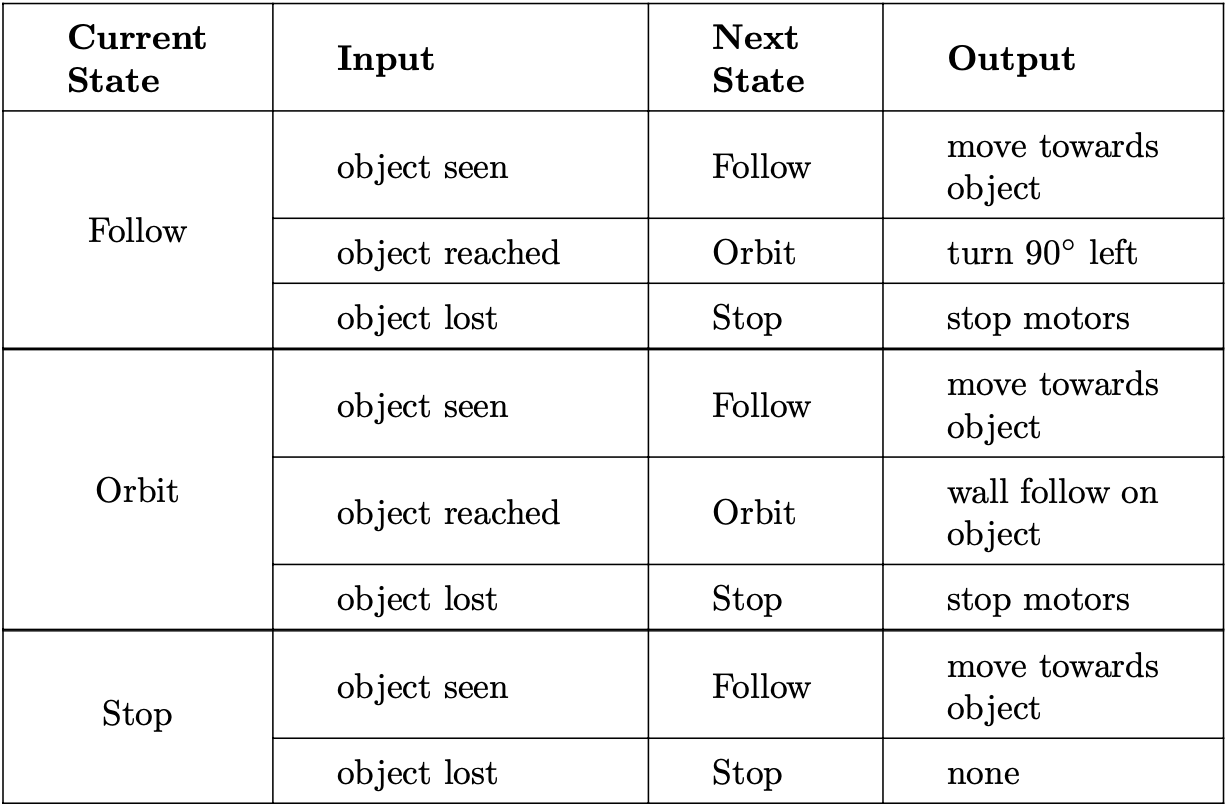
Building robust PID controllers for smooth wall-following behavior required careful tuning to maintain consistent distance from walls while navigating around corners and obstacles. Additionally, designing a finite state machine to coordinate complex behaviors demanded thoughtful architecture to ensure smooth transitions between different operational modes and reliable performance across various environmental conditions.